Here are some of the research we are working on in the Geometric Computing lab:
- Visibility:
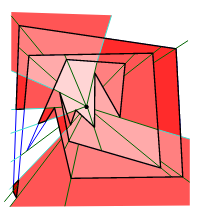
Visibility is a topic in Computational Geometry with application in computer graphics, robotics, and computer-aided design to name a few. In the Geometric Computng lab we study different variation of visibility under different assumption such as constrained memory seetings.
Selected Papers:
- A Time-Space Trade-off for Computing the k-Visibility Region of a Point in a Polygon. Theoretical Computer Science 2019.
- Watchtower for k-crossing Visibility. In the Canadian Conference on Computational Geometry (CCCG) 2019.
- Computing the k-Visibility Region of a Point in a Polygon. Theory of Computing Systems 2020.
- Segment Visibility for k-transmitters. The International Symposium on Algorithmics of Wireless Networks (ALGOWIN) 2023.
- Discrete Planar Two-watchtower Problem for k-visibility.The International Conference on Wireless Intelligent, and Distributed Environment for Communication(WIDECOM) 2023.
- Control System:
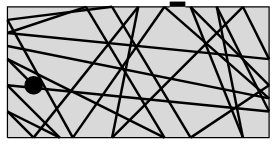
In the Geometric Computing lab we study problem arising the control system and robotics related to visibility. We study and analyze the movements of variations of robots using our knowledge in visibility.
Selected Papers:
- Bouncing Robots in Rectilinear Polygons In 26th International Conference on Methods and Models in Automation and Robotics (MMAR) 2022.
- Escaping from a Rectangular Room. In 27th International Conference on Methods and Models in Automation and Robotics (MMAR) 2023.
- Additive Manufacturing (AM):
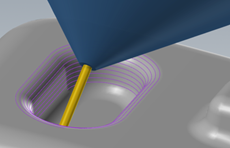
AM is a new method of manufacturing to construct complext solid and use less raw material. Computational Geometry develope an import role to create afficient and acourate algorithms in this feild. In the Geomeric Computing lab we investigate such algorithms.
Selected Papers:
- Collision-Free Multi-Axis Tool-Path for Additive Manufacturing. Computer-Aided Design and Applications 2023.
- Improved Collision-Free Multi-Axis Tool-Path for Additive Manufacturing. CAD and Exhibition conference(CAD’23) 2023.
- Visibility based Pursuit-Evasion (PE) Problem:
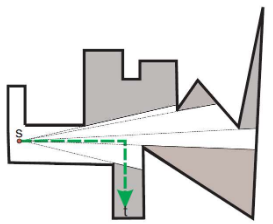
In the visibility based PE, given a geometric map, one or more pursuers moving to detect some evaders. An evader will be detected if seen by a pursuer. In the Geometric Computing lab, we study PE considering different variation of PE, considering diferent types of visibility.
Selected Papers:
- 2-modem Pursuit-Evasion Problem. European Workshop on Computational Geometry (EuroCG) 2013.
- Blocking an Evader in a Polygon by a 2-modem Searcher. International Conference on Computer, Information Technology and Digital Media (CITaDIM) 2013.
- Conflict-Free Chromatic Guarding of Orthogonal Polygons with Sliding Cameras. Canadian Conference on Computational Geometry (CCCG) 2023.
- Simultaneous Localization and Mapping (SLAM):
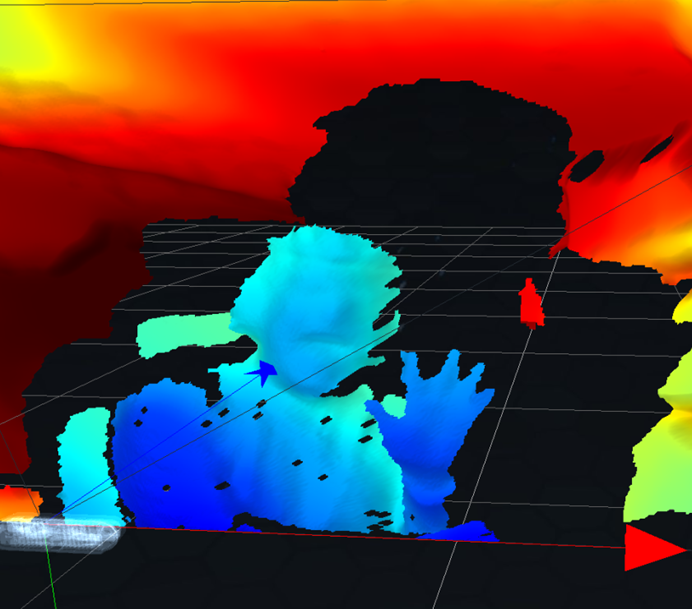
Simultaneous Localization and Mapping (SLAM) procedures estimate the pose of an agent in an unknown environment while mapping it. This can be done using a video as the sole input - a sub-problem known as visual SLAM or through other means of visibility such as wireless communication. In our lab we study SLAM from different aspects.
Selected paper: